

Introduction: Penguin on Ice







"Penguin On Ice" is my 3D printed interpretation of JKBrickworks "Penguin On Ice" Lego model. We enjoyed their model so much, I decided to design, 3D print and assemble this non-Lego version.
Both models utilize a "Trammel of Archimedes" mechanism which utilizes "channels", "shuttles" and "link arms" to generate the penguin motion (see the "Penguin On Ice Mechanism, CAD View" video). The channels, shuttles and upper link arm in the JKBrickworks model are exposed, but in this model, the channels, shuttles and upper link arm are hidden beneath the cover build plate side "ice surface", and the penguin, magnetically coupled to the upper link arm, appears to skate on a smooth surface of ice.
For the model to operate correctly, the cover ice surface must be glass smooth. As I 3D printed mine on a glass build plate, mine was smooth without any further finish work required. But your cover may need sanding and polishing to attain the required surface if 3D printed on a non-glass build plate.
I've included an assembly video illustrating how I assembled the mechanism.
As usual, I probably forgot a file or two or who knows what else, so if you have any questions, please do not hesitate to ask as I do make plenty of mistakes.
Designed using Autodesk Fusion 360, sliced using Ultimaker Cura 4.12.1, and 3D printed in PLA on Ultimaker S5s.
Supplies
Soldering Iron and Solder.
Thick cyanoacrylate glue.
Step 1: Parts.
I acquired the following parts:
- One N20 6VDC 70RPM right angle gear motor.
- One four AAA switched battery pack.
- Four AAA batteries.
- Six 6mm diameter by 2.7mm thick neodymium magnets.
I 3D printed the following parts at .15mm layer height, 20% infill :
- One "Arm Lower.stl".
- One "Arm Upper.stl".
- Four "Axle (M8 by 1.25 by 8).stl".
- One "Base.stl".
- Four "Bolt (M8 by 1.25 by 8).stl".
- One "Channels.stl".
- One "Cover.stl".
- One "Gear (2m 8t).stl".
- One "Gear (2m 32t).stl".
- Ice Sign Blue.stl
- Ice Sign White.stl
- One "Ice Sign.3mf".
- Is Nice Sign Blue.stl
- Is Nice Sign White.stl
- One "Is Nice Sign.3mf".
- One "Penguin Beak.stl".
- Penguin Body Black.stl
- Penguin Body White.stl
- One "Penguin Body.3mf".
- One "Penguin Coupler.stl".
- Penguin Eye Left Black.stl
- Penguin Eye Left White.stl
- Penguin Eye Right Black.stl
- Penguin Eye Right White.stl
- Penguin Head Left Black.stl
- One "Penguin Head Left.3mf".
- Penguin Head Right Black.stl
- One "Penguin Head Right.3mf".
- Penguin Wing Left.stl".
- Penguin Wing Right.stl".
- Two "Shuttle.stl".
- One "Snowball.stl".
- Four "Standoff.stl".
If a quantity is not listed in the above list, it is a component used in the creation of a .3mf component. If you use a single extrusion printer, then these components may be 3D printed individually thenassembled with glue.
This is a precision 3D print and assembly model using at times very small precision parts in very tight spaces. Prior to assembly, test fit and trim, file, sand, polish, etc. all parts as necessary for smooth movement of moving surfaces, and tight fit for non moving surfaces. Depending on you printer, your printer settings and the colors you chose, more or less trimming, filing, sanding and/or polishing may be required. Carefully file all edges that contacted the build plate to make absolutely certain that all build plate "ooze" is removed and that all edges are smooth. I used small jewelers files and plenty of patience to perform this step.
The model also uses threaded assembly thus an M8 by 1.25 tap and die will assist with thread cleaning if necessary.
Attachments
 Arm Lower.stl
Arm Lower.stl- Arm Upper.stl
- Axle (M8 by 1.25 by 8).stl
- Base.stl
- Bolt (M8 by 1.25 by 8).stl
- Channels.stl
- Cover.stl
- Gear (2m 8t).stl
- Gear (2m 32t).stl
- Ice Sign Blue.stl
- Ice Sign White.stl
- Ice Sign.3mf
- Is Nice Sign Blue.stl
- Is Nice Sign White.stl
- Is Nice Sign.3mf
- Penguin Beak.stl
- Penguin Body Black.stl
- Penguin Body White.stl
- Penguin Body.3mf
- Penguin Coupler.stl
- Penguin Eye Left Black.stl
- Penguin Eye Left White.stl
- Penguin Eye Right Black.stl
- Penguin Eye Right White.stl
- Penguin Head Left Black.stl
- Penguin Head Left.3mf
- Penguin Head Right Black.stl
- Penguin Head Right.3mf
- Penguin Wing Left.stl
- Penguin Wing Right.stl
- Shuttle.stl
- Snowball.stl
- Standoff.stl





























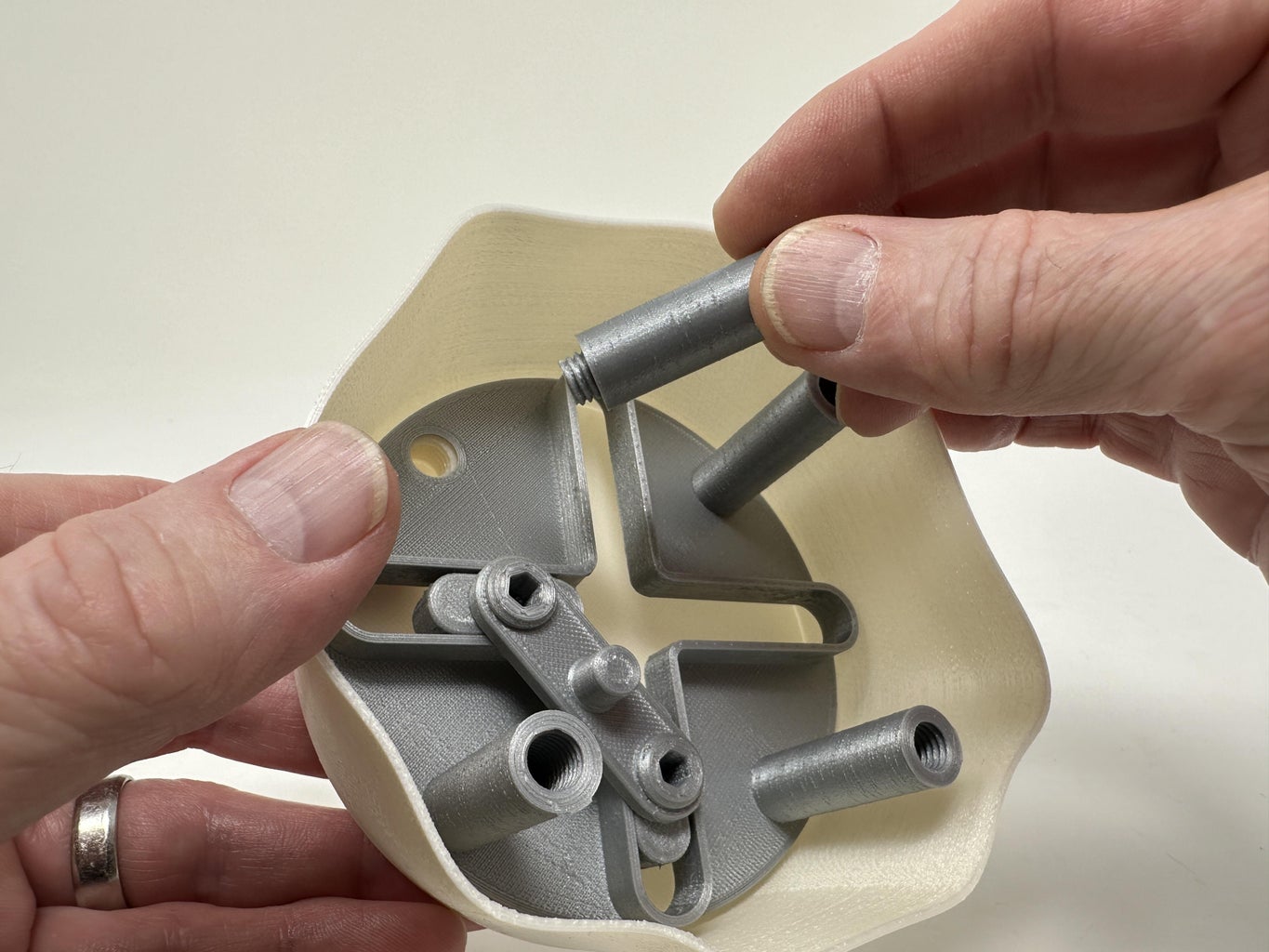
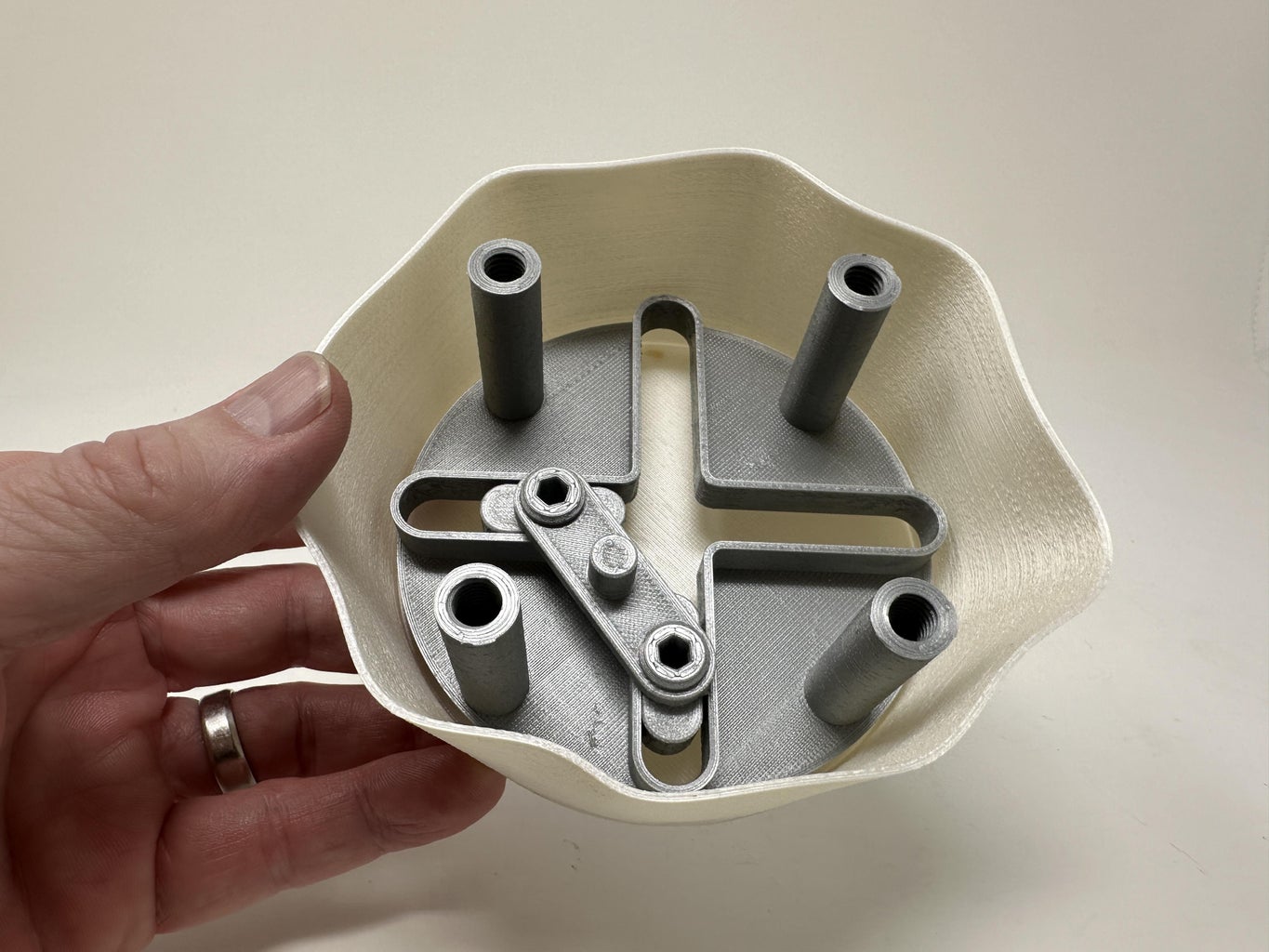
Step 2: Channels Assembly.

To assemble the channels, I performed the following steps:
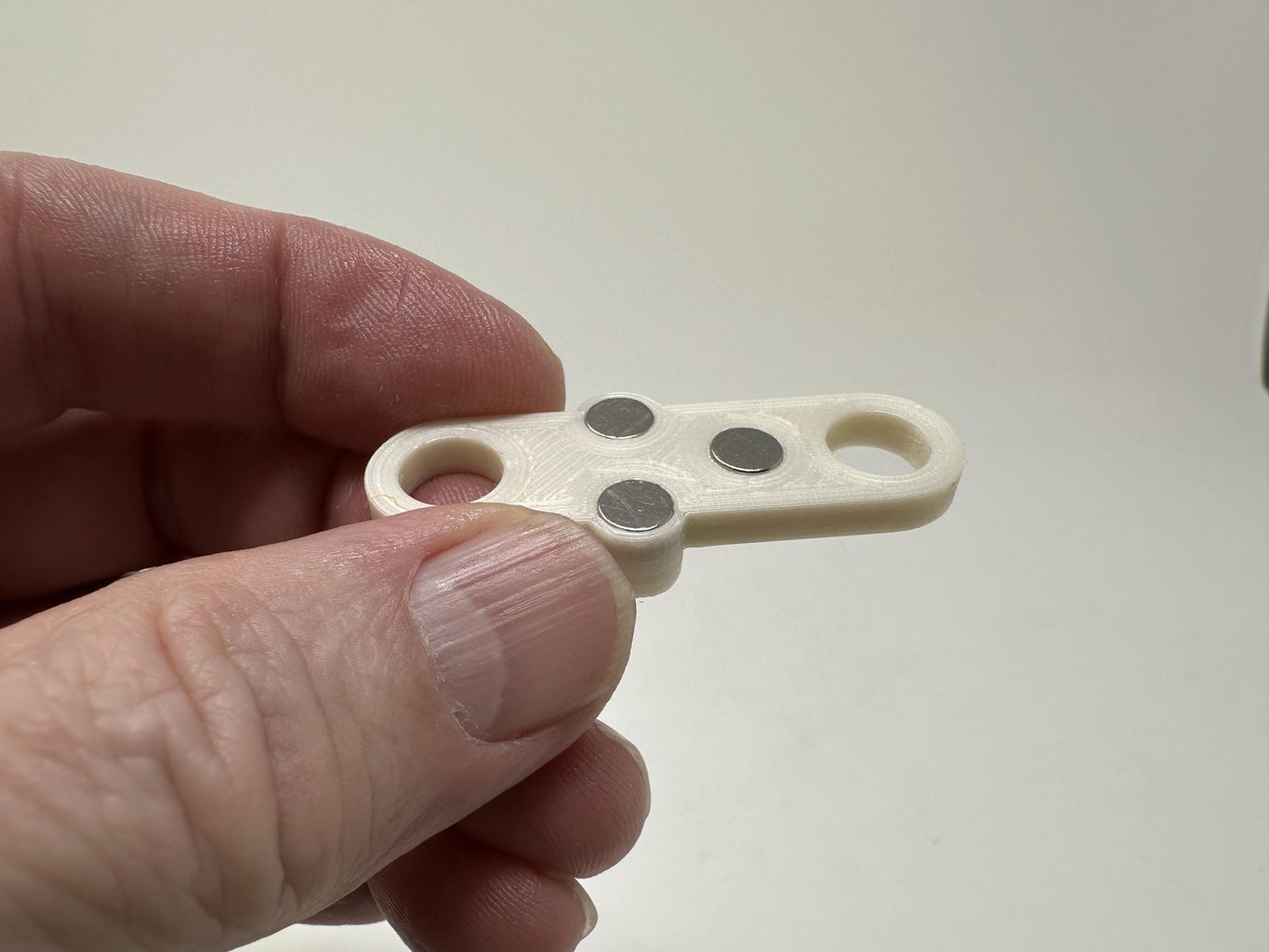
- Pressed three neodymium magnets into "Arm Upper.stl" with matching polarity and flush with the bottom surface of the arm.
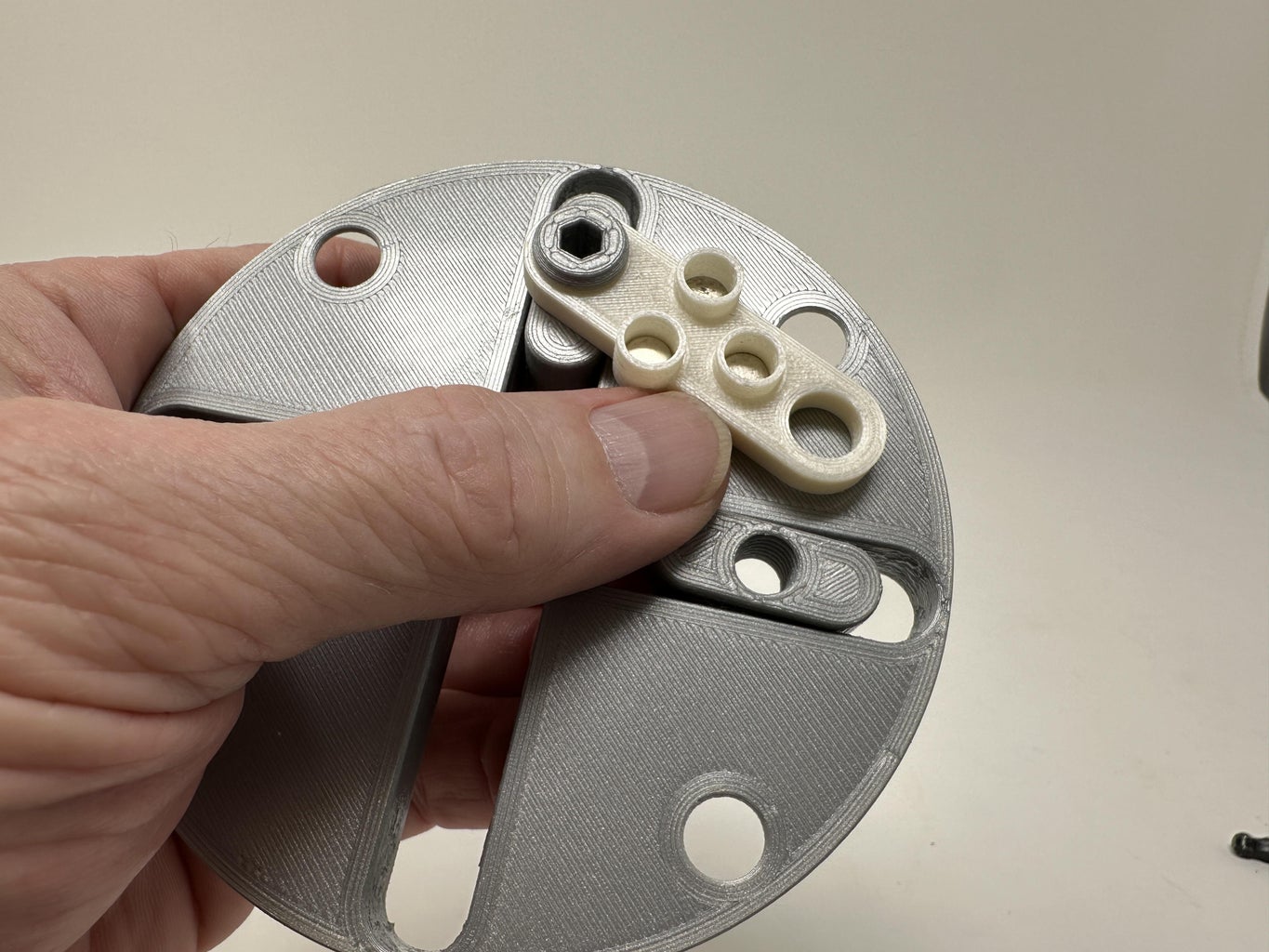
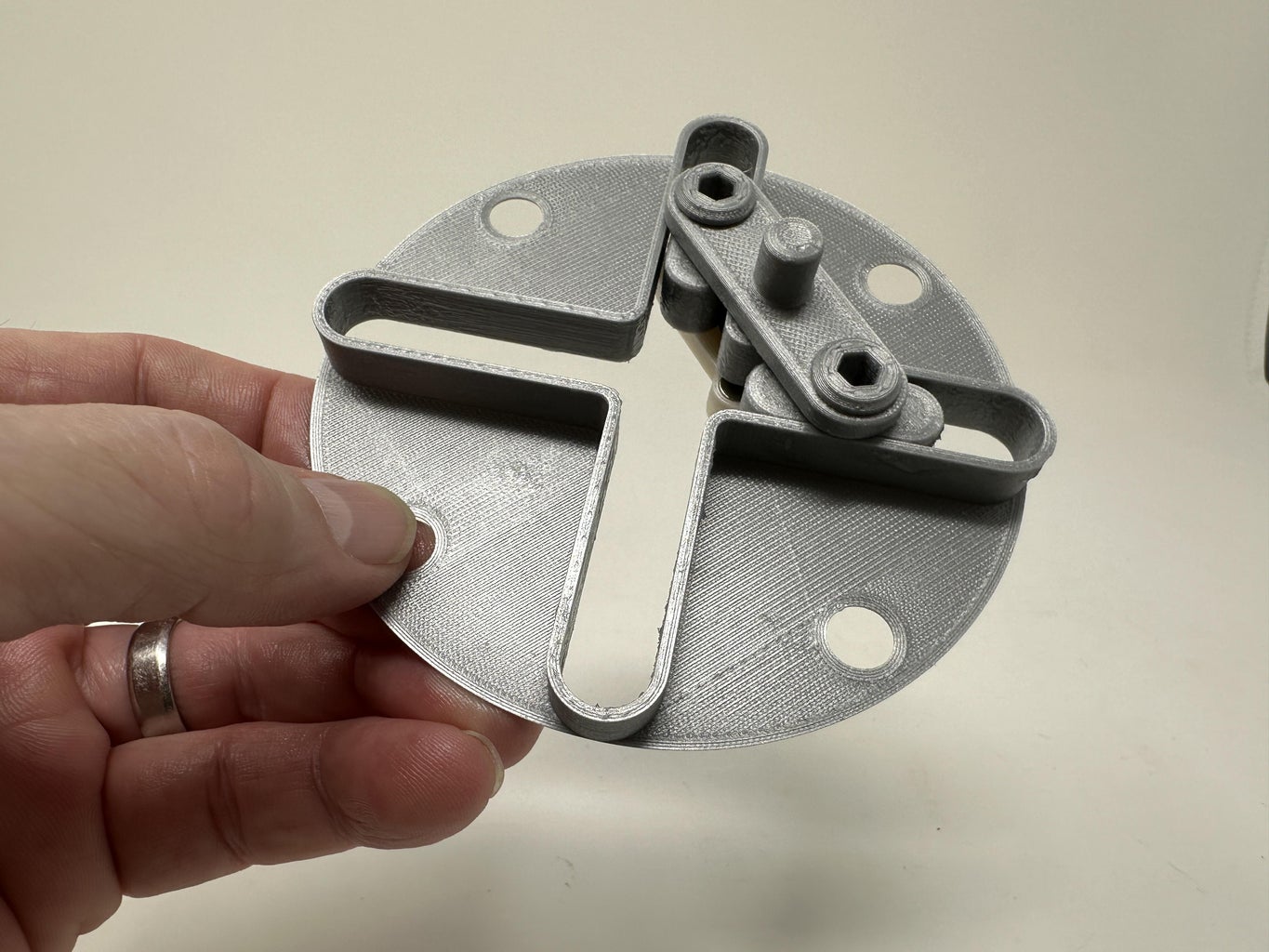
- Positioned one "Shuttle.stl" into one of the two channels in "Channels.stl".
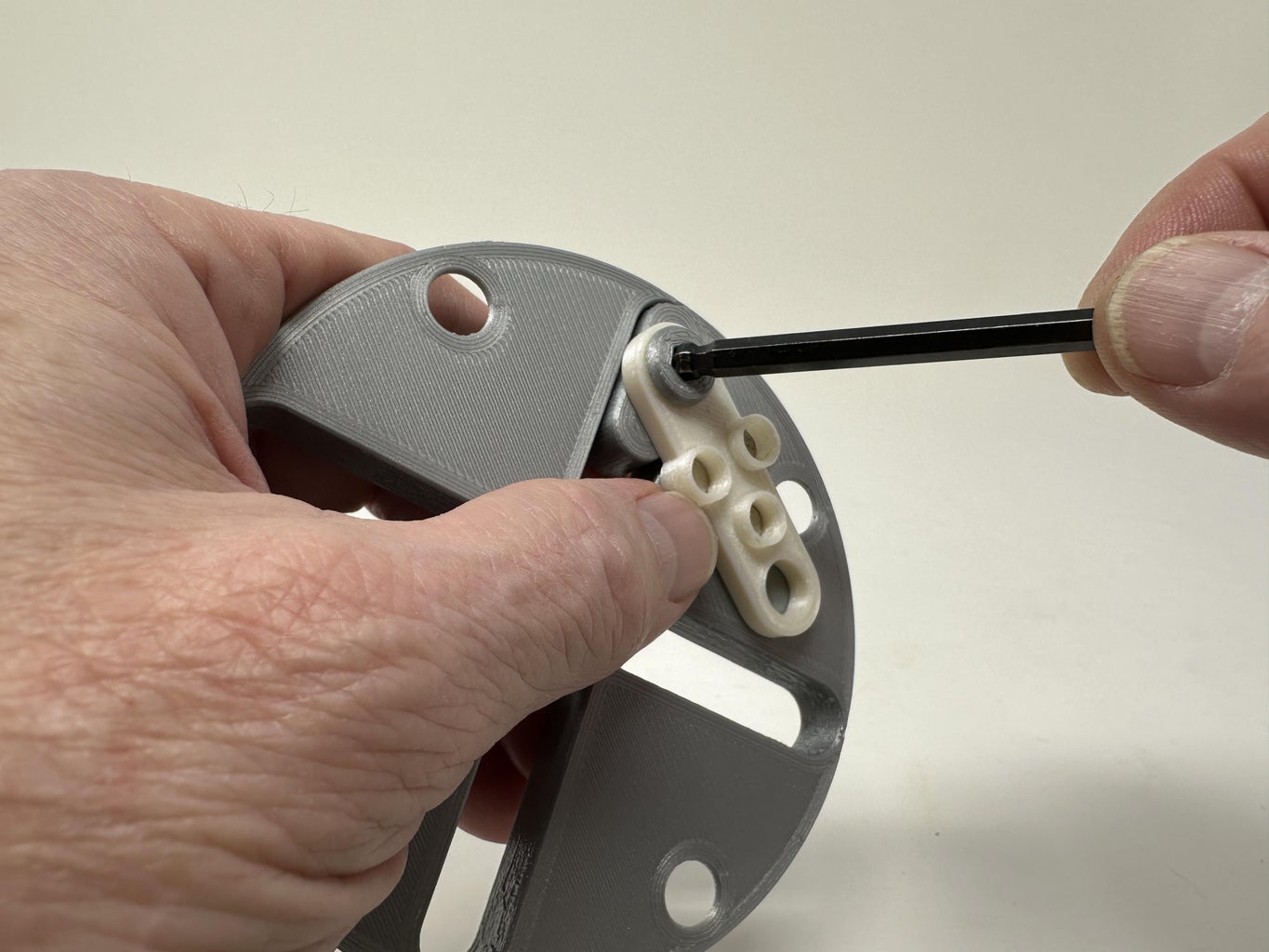
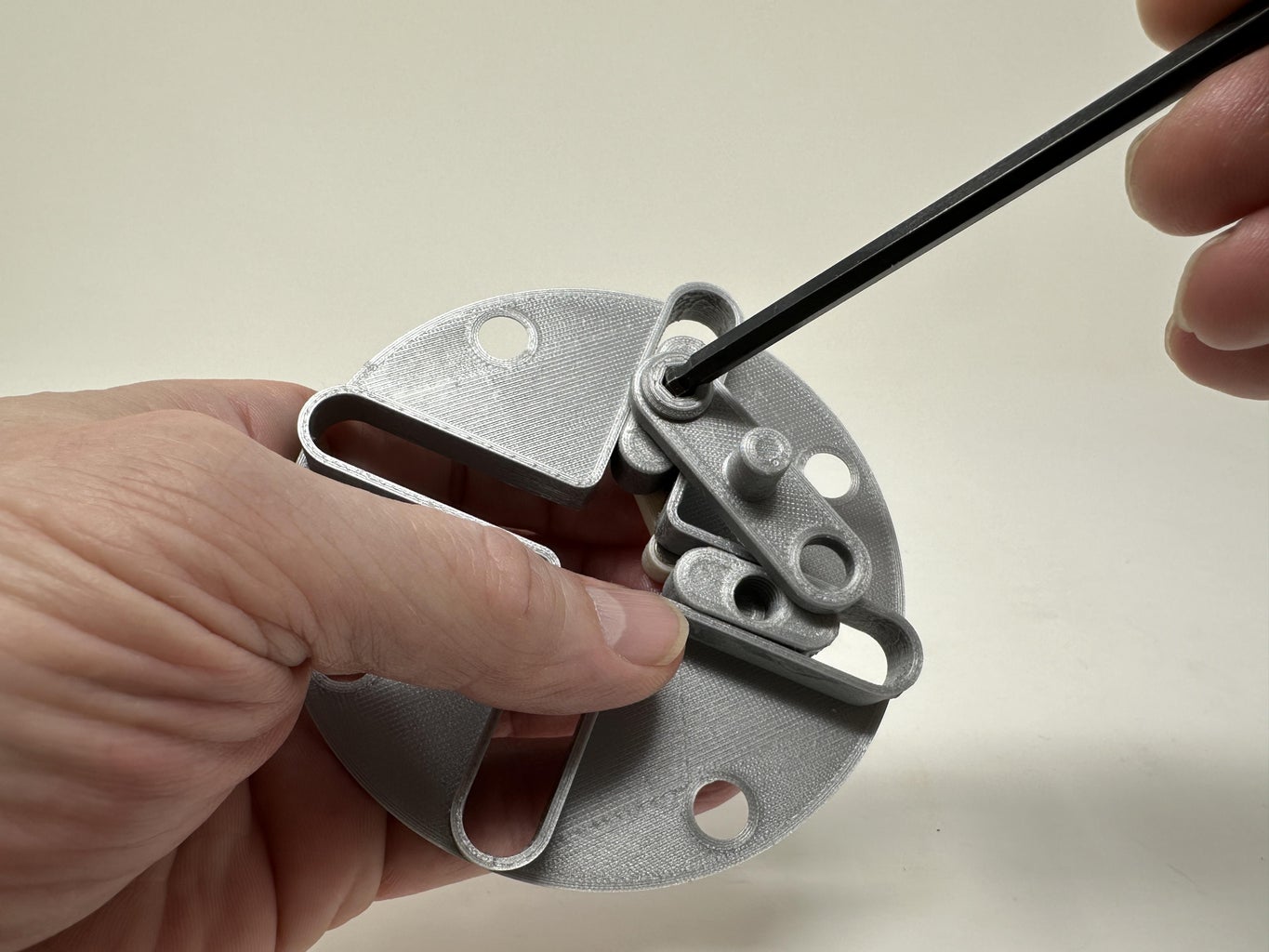
- Secured the upper arm assembly to the shuttle on the top side of the channel assembly using one "Axle (M8 by 1.25 by 8).stl".
- Positioned the remaining shuttle into the remaining channel in the channels assembly.
- Secured the upper arm assembly to the remaining shuttle on the top side of the channel assembly using one "Axle (M8 by 1.25 by 8).stl".
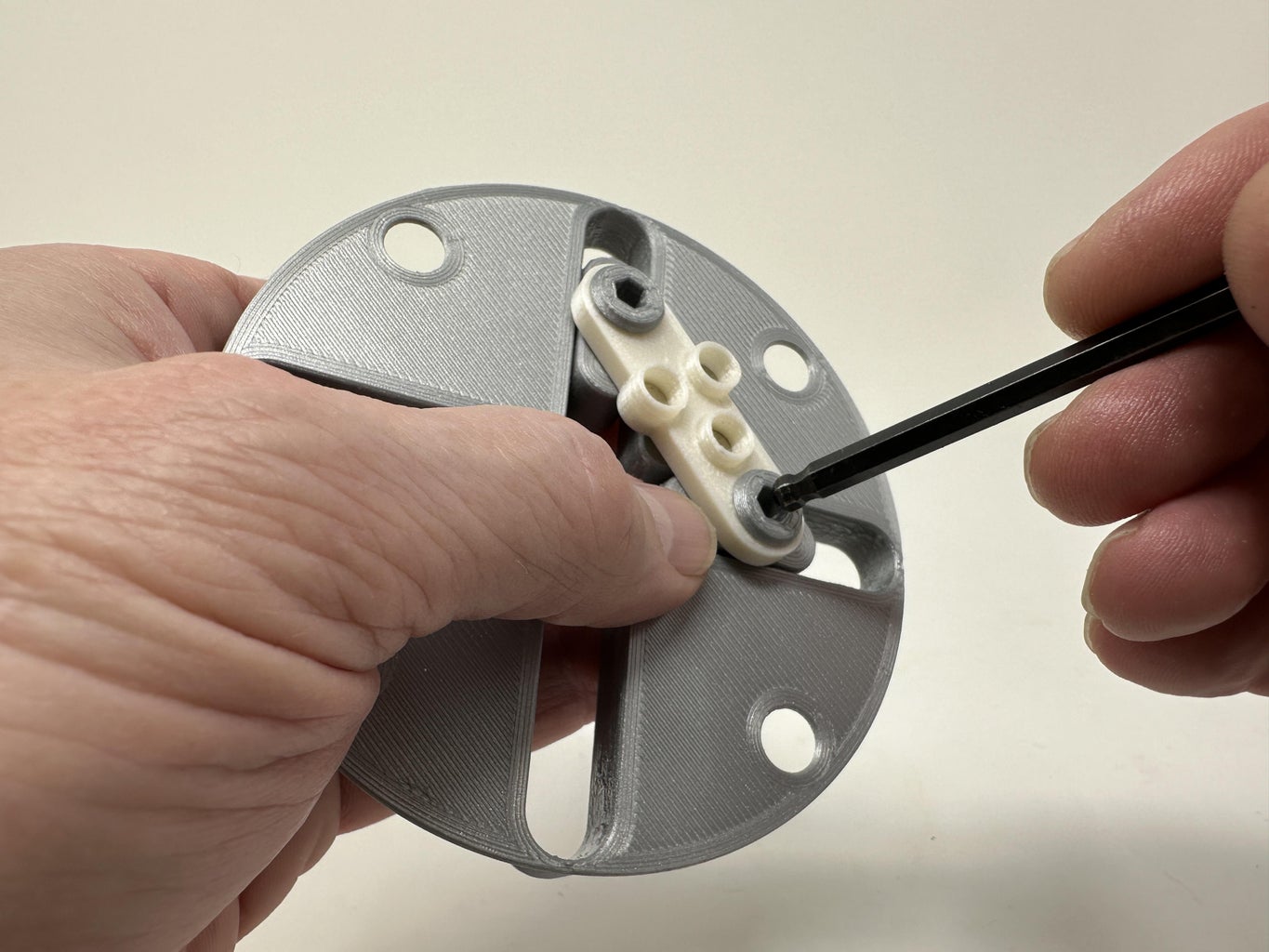
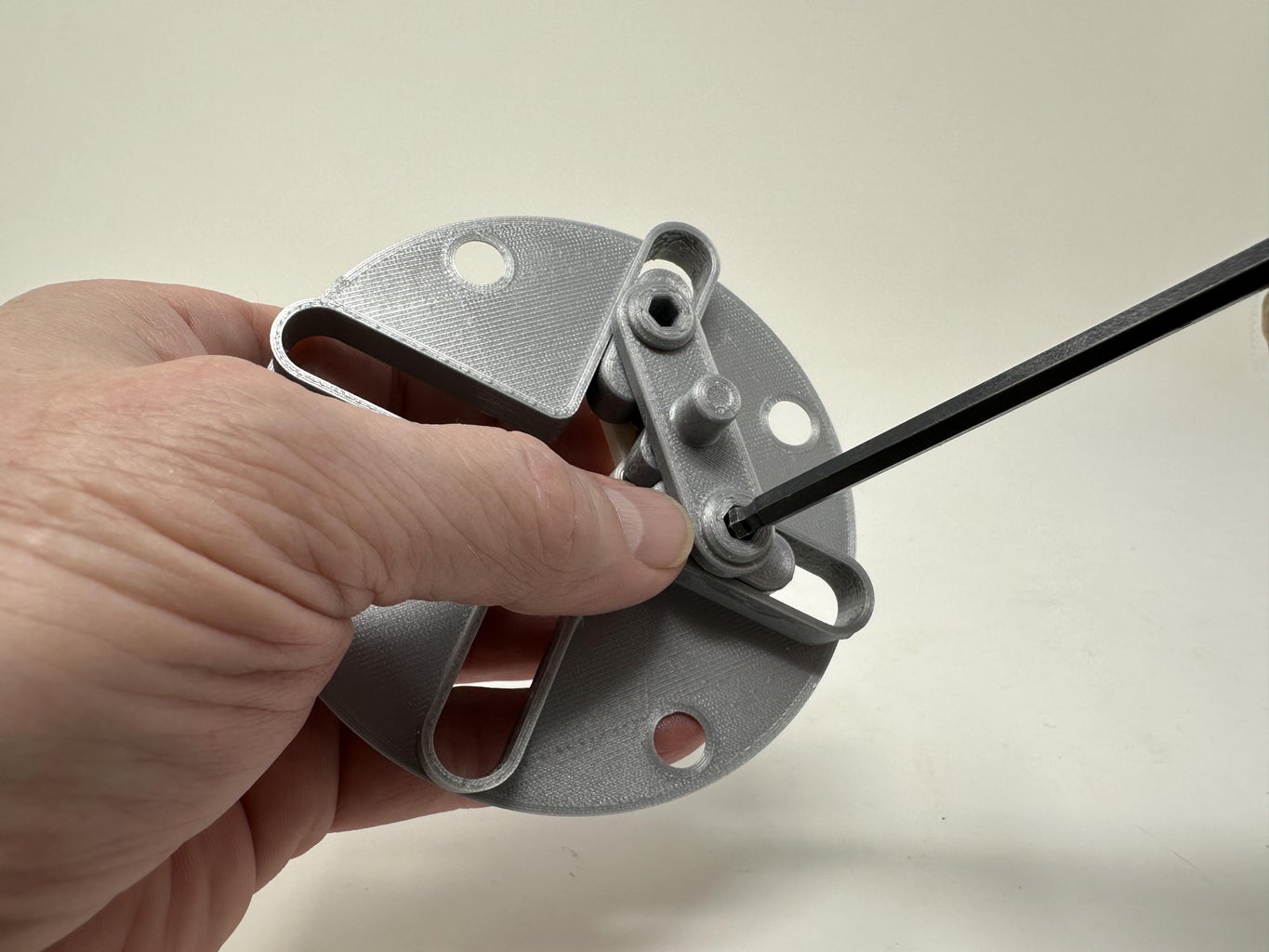
- Secured "Arm Lower.stl" to the bottom of the two shuttles using two "Axle (M8 by 1.25 by 8).stl" noting the pin orientation.
- While rotating the pin on the lower arm in a circular motion, I made certain the mechanism operated smoothly.
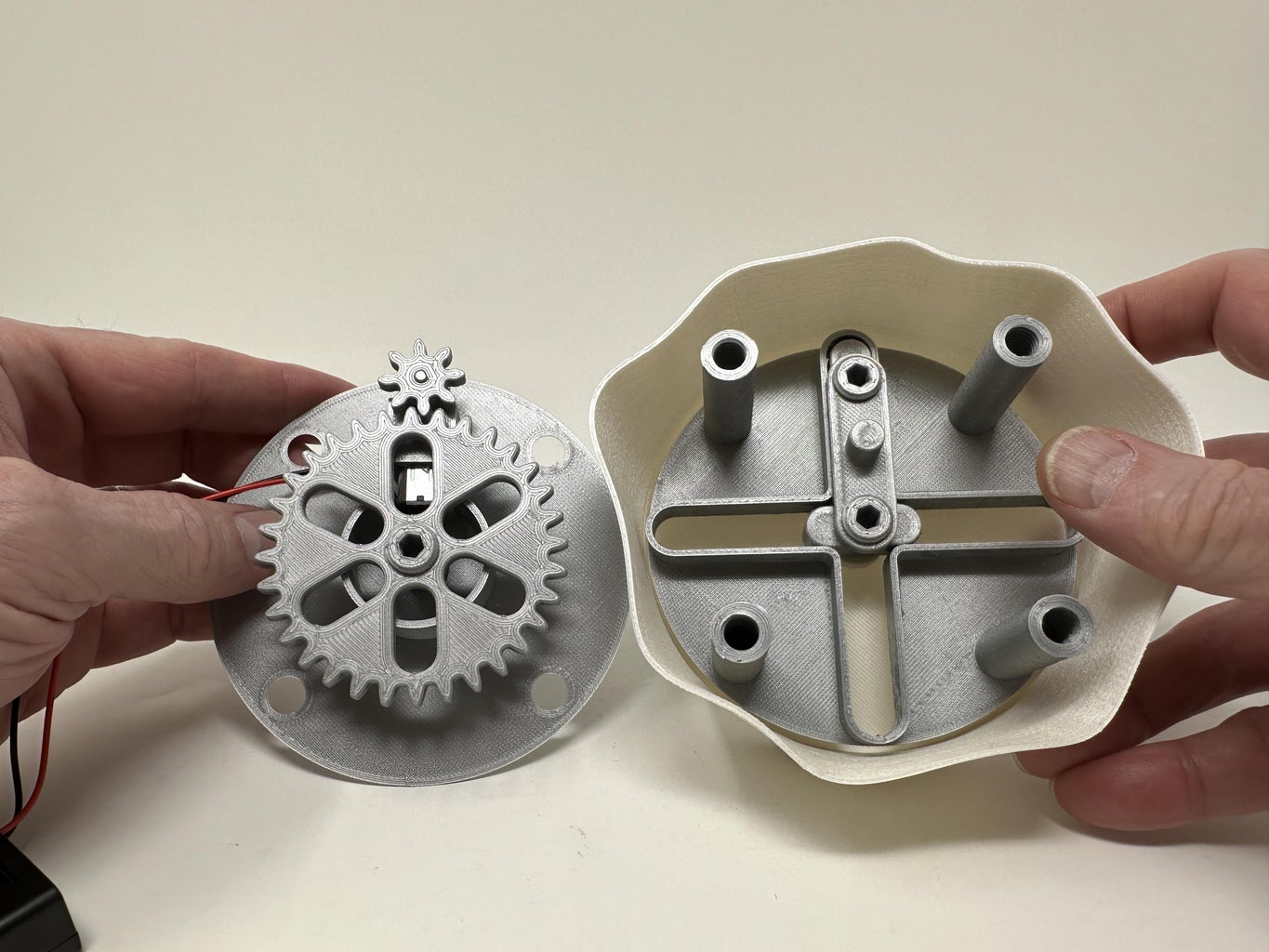
Step 3: Base Assembly.
To assemble the base, I performed the following steps:
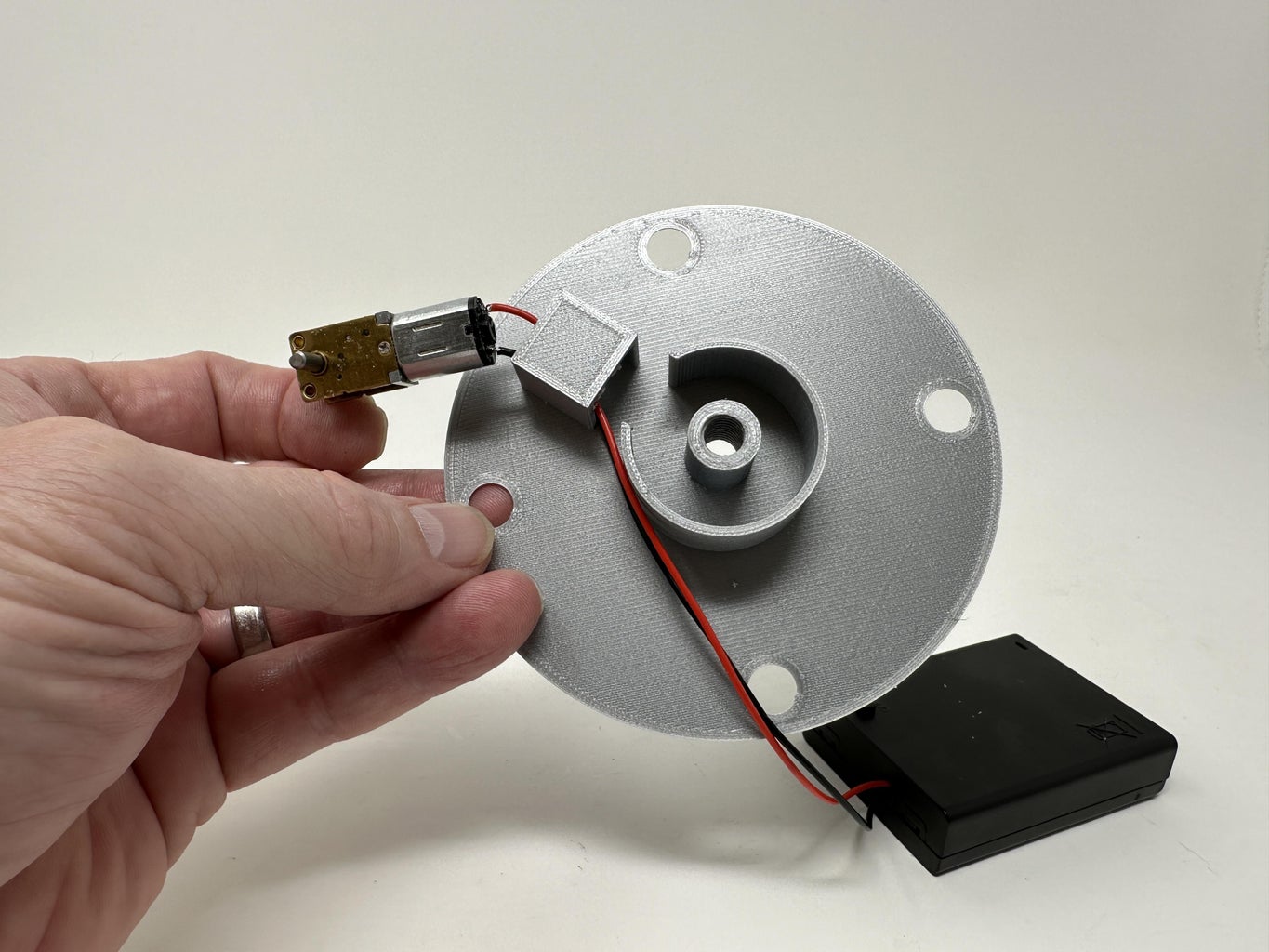
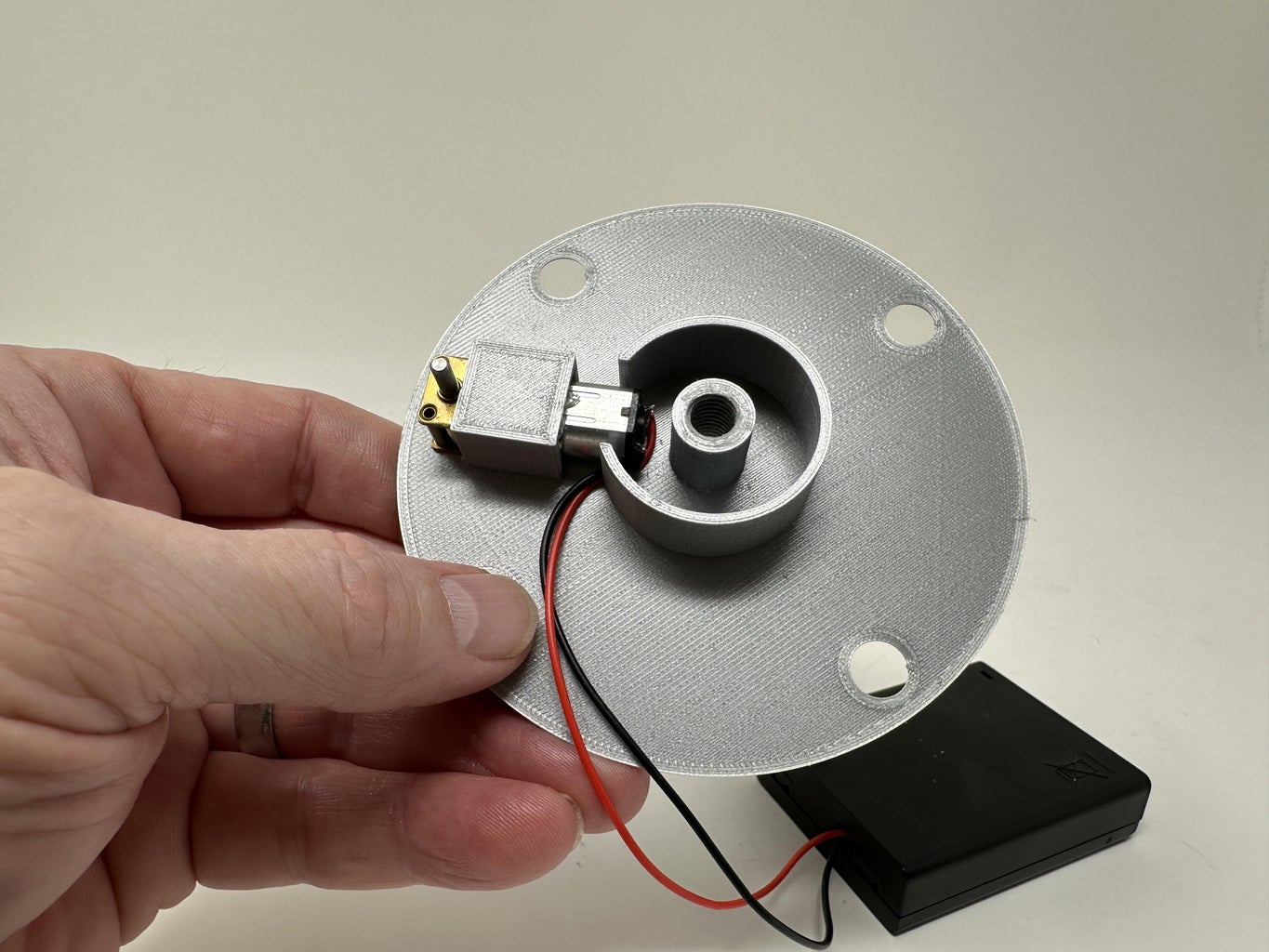
- Slid the battery pack wires from the inside of the motor pocket in "Base.stl" through the motor pocket to the outside then soldered the battery pack wires to the gear motor.
- Pressed the gear motor into the motor pocket.
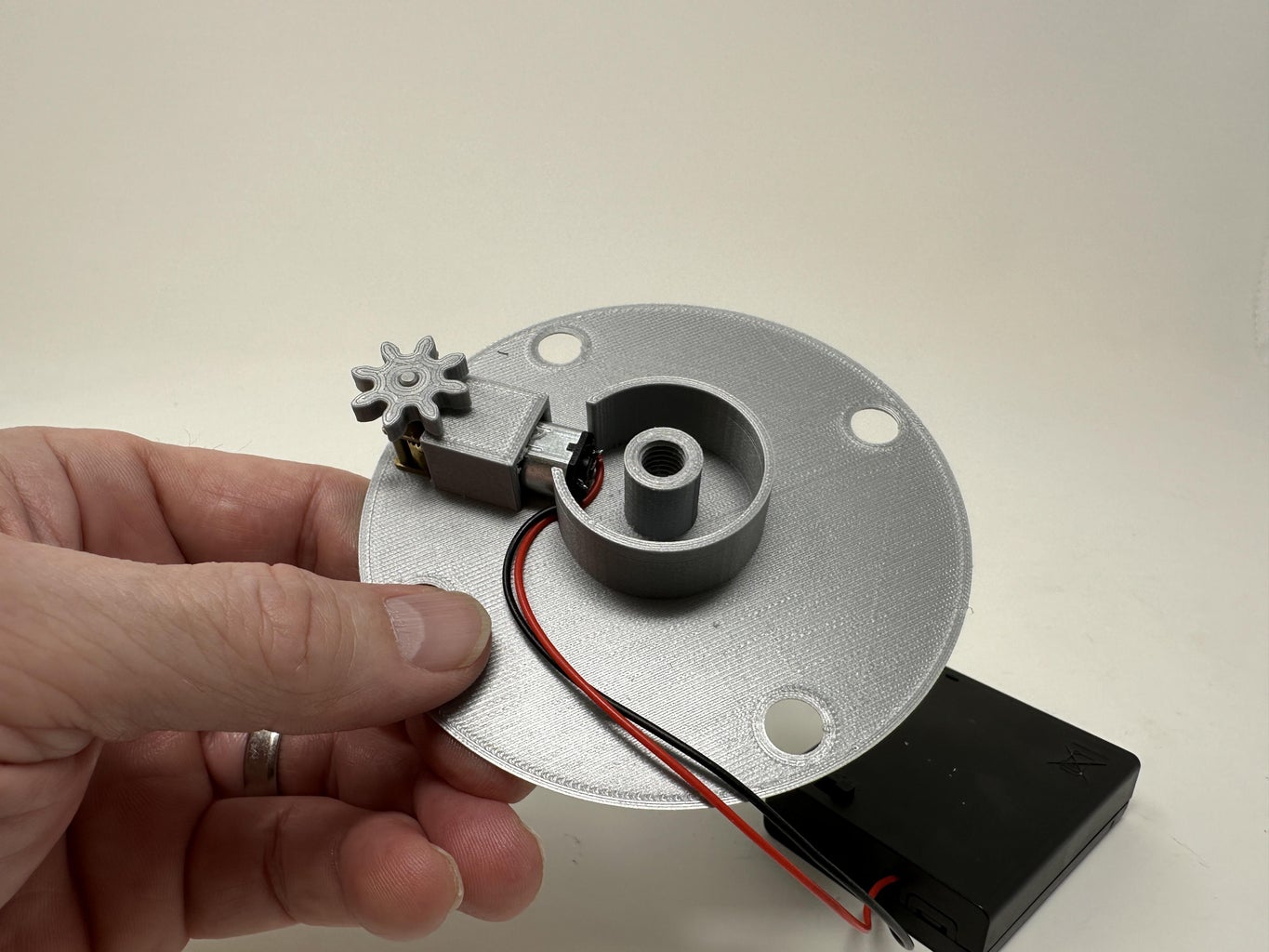
- Pressed "Gear (2m 8t).stl" onto the gear motor shaft.
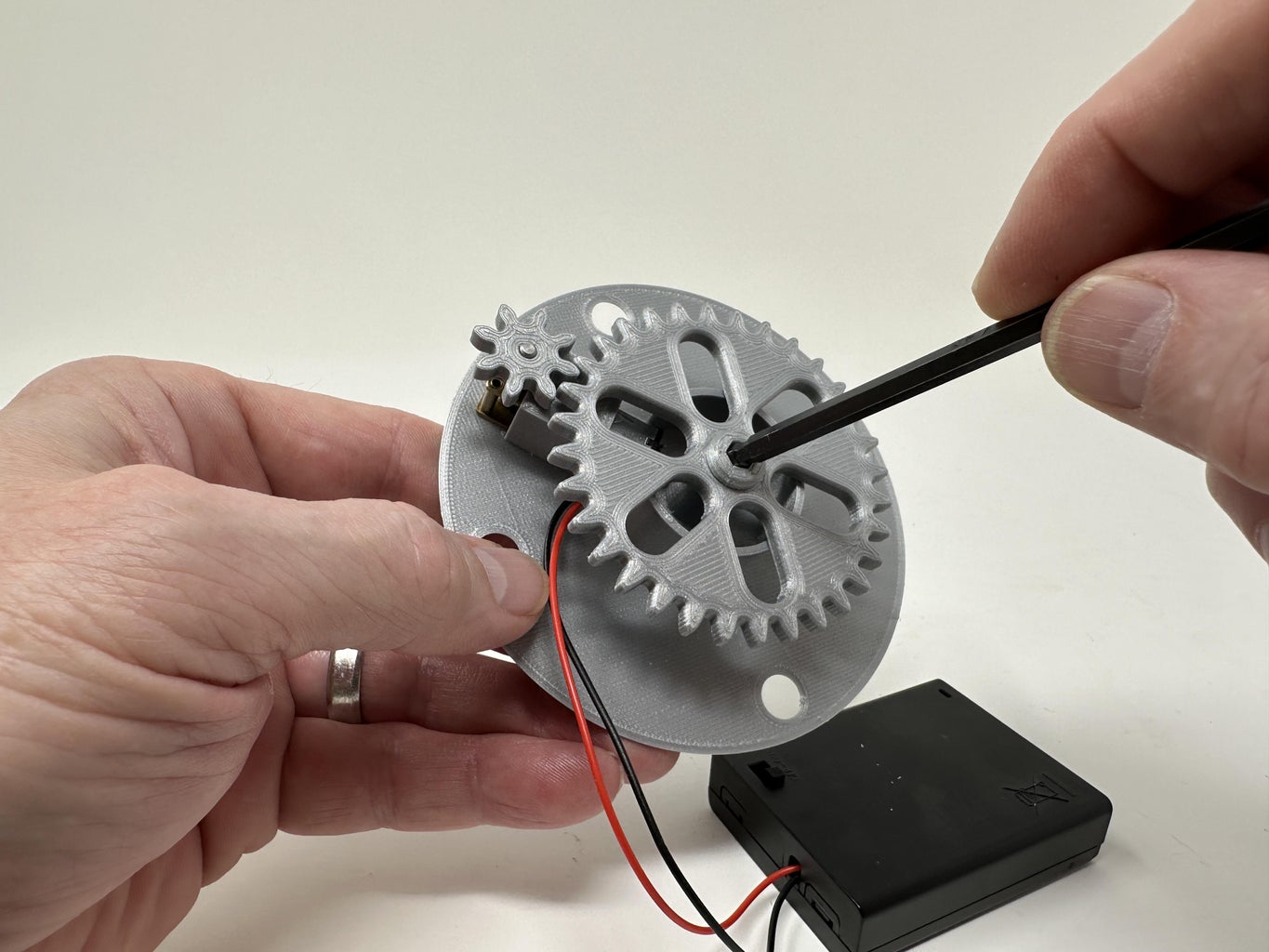
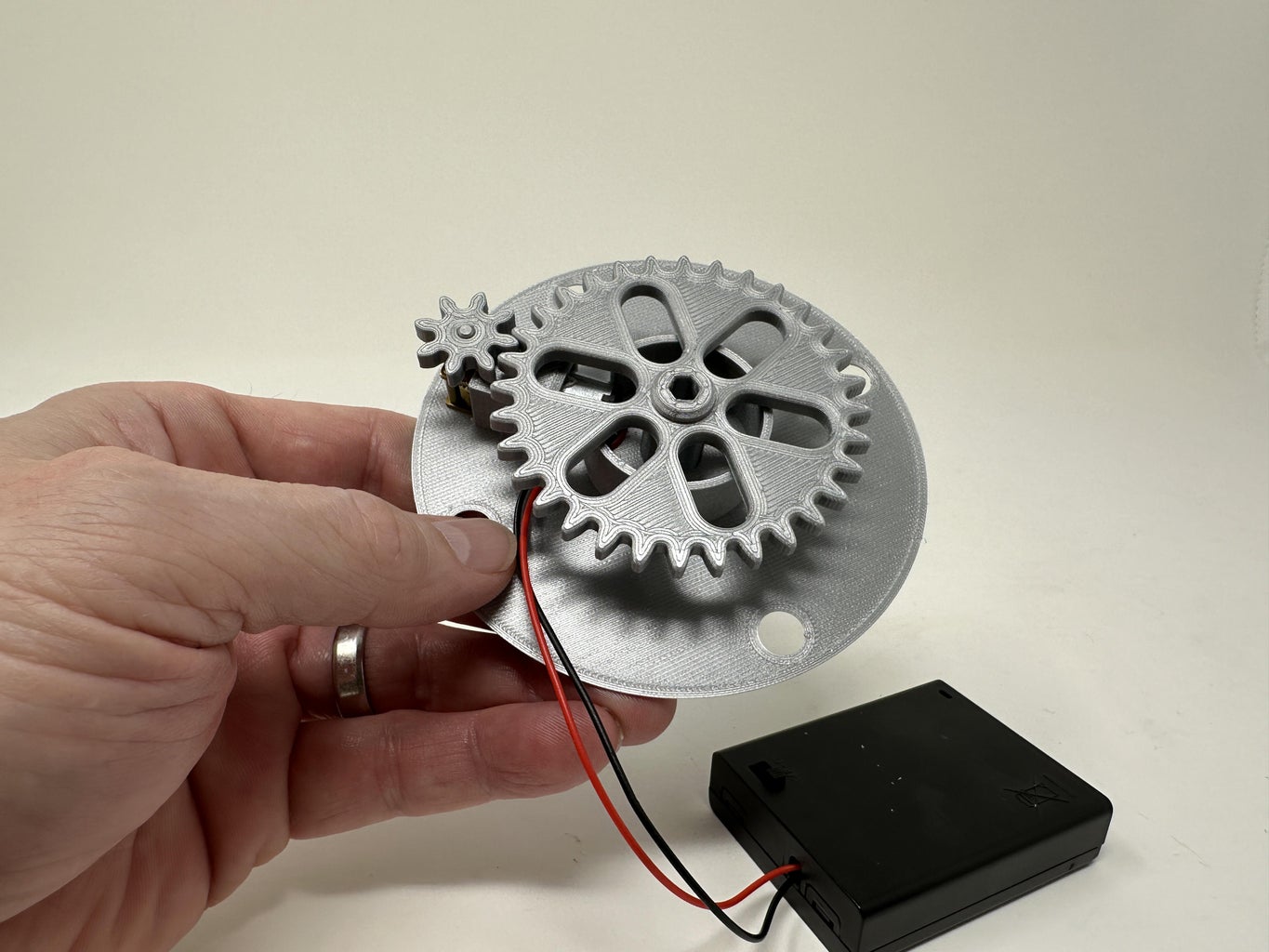
- Attached "Gear (2m 32t) to the base gear tower using one "Axle (M8 by 1.25 by 8).stl".
Step 4: Penguin Assembly.


To assemble the penguin, I performed the following steps similar to the "Penguin At The Pole" model:
- Glued "Beak.stl" onto "Penguin Head Left.3mf".
- Glued "Penguin Head Right.3mf" to the head left assembly.
- Glued the head assembly to "Penguin Body.3mf".
- Glued "Penguin Wing Left.stl" to the left slot in the penguin body.
- Glued "Penguin Wing Right.stl" to the right slot in the penguin body.
- Glued "Ice Sign.3mf" and "Is Nice Sign.3mf" to the right arm.
- Glued "Snowball.stl" to the left arm.
- Glued three neodymium magnets into the magnet pockets in "Penguin Coupler.stl" matching the polarity of the upper arm magnets.
- Glued the coupler assembly to the base of the penguin body assembly such that one magnet faced forward.
Step 5: Final Assembly.
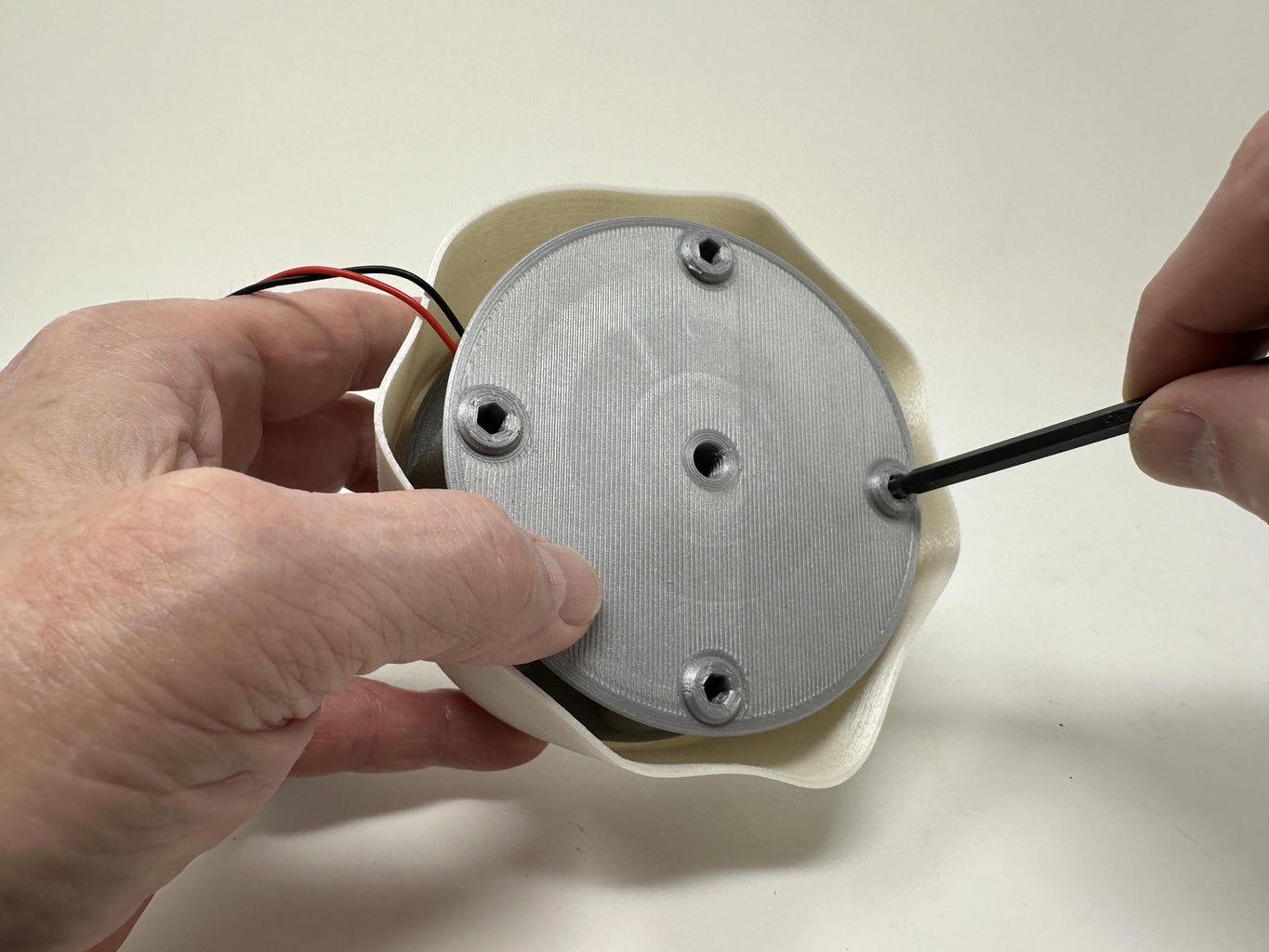


For final assembly, I performed the following steps:
- Attached the channels assembly to "Cover.stl" using four "Standoff.stl".
- With the 32 tooth gear aligned with the lower arm pin, secured the base assembly to the cover assembly using four "Bolt (M8 by 1.25 by 8).stl".
- Carefully positioned the Penguin assembly on the cover aligned with the upper arm magnets.
With final assembly complete, I turned on the battery case switch and the penguin traversed the ice! If your penguin does not follow the mechanism, you should lift the upper arm magnets closer to the penguin. Once properly adjusted, secure the upper arm magnets in position using glue.
And that is how I 3D printed and assembled "Penguin On Ice".
I hope you enjoyed it!







6 Comments
16 hours ago
these are just so cute!!!!!
Question 1 day ago on Step 5
At an age where constructing would be far too challenging!! Designs extremely clever and Super!..Interested in the penguin on the unicycle! ..Rode one many years ago...brought
back great memories!...Any chance you'd be willing to make & sell one? Understand possible
"impediments" / legalities....Thank you for your time & interest!.....Possible to connect with you safely?
2 days ago on Step 5
I really enjoy each of your designs! Thanks for sharing them in this community!
Reply 1 day ago
Thank you cfb70, I'm glad you enjoy them and I like to inspire by sharing!
Greg
Question 1 day ago
What license is this released under?
Answer 1 day ago
Hi jrweikle,
At the top of this page, just to the right of the published date, is a button that can be clicked to observe the license, which for all of my designs, is "attribution, noncommercial, share alike".
Greg